



-

 Quick View
Quick View -

 Quick View
Quick View -
Quick View
-

 Quick View
Quick View -
 Quick View
Quick View -
Quick View

O Unitree H1 é um robô humanoide de tamanho real desenvolvido pela Unitree Robotics, empresa de referência na área da robótica. Foi lançado em 2021 e é o primeiro robô humanoide da sua categoria a Read more…

O Unitree B2 é o novo robô quadrúpede de grande porte desenvolvido pela Unitree Robotics. Foi lançado em 2023 e é o sucessor do Unitree B1. O robô tem uma altura de 1,6 metros e Read more…

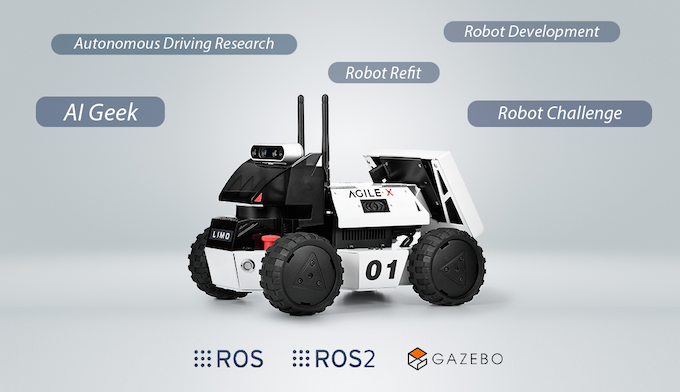
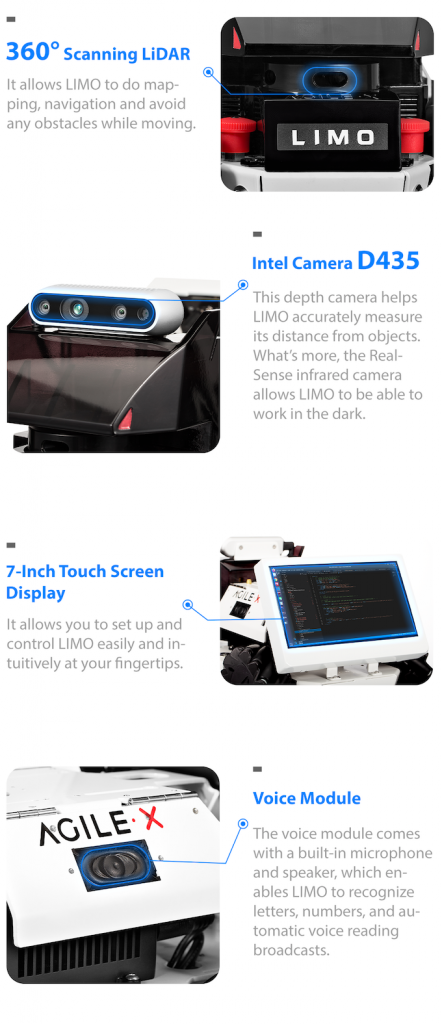
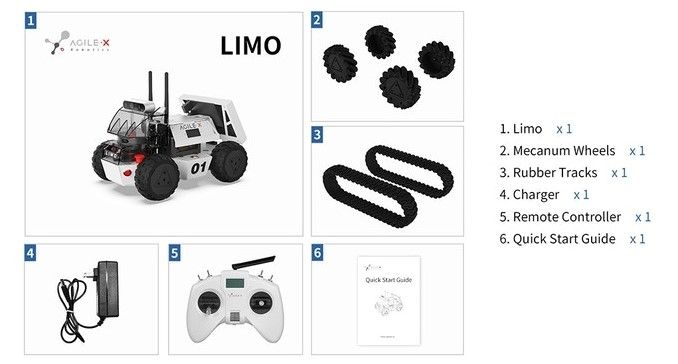
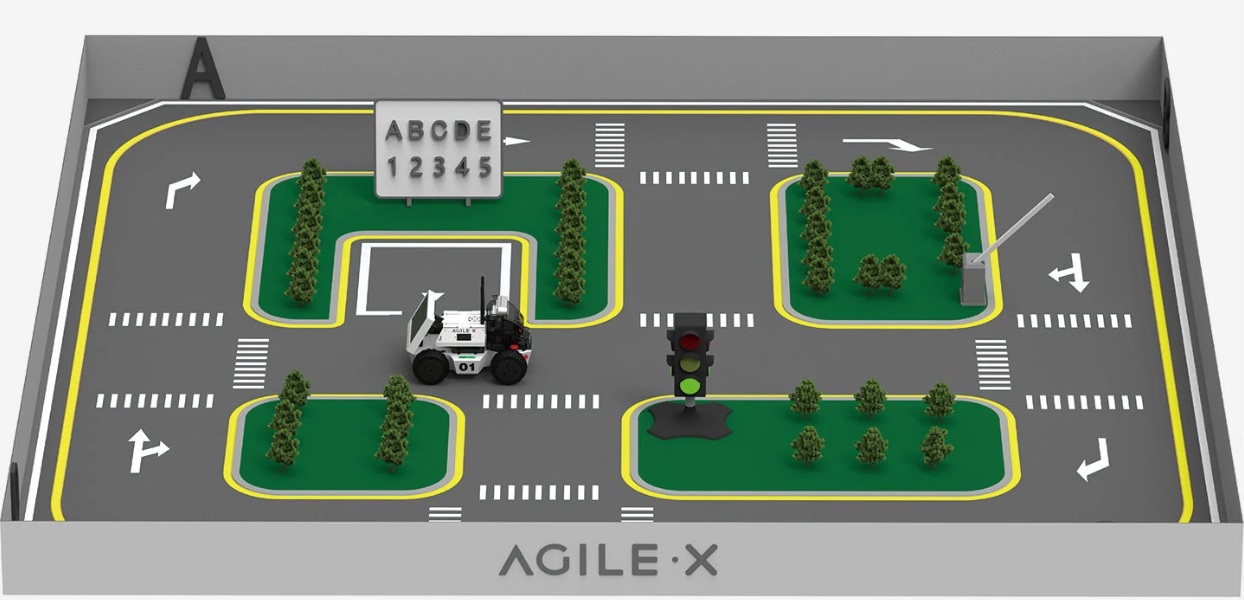
AgileX Robotics, fornecedora líder de plataformas robóticas na investigação, educação e produção, anunciou o lançamento do LIMO PRO e do LIMO ROS2, dois novos robôs específicos para a área de educação e investigação. Estes dois Read more…

0 Comments