

Descrição
Especificações técnicas
- Degrees of freedom: 6; Number of joints: 12; Repeatability: ±0.20mm
- Maximum thumb gripping force: 6N; Maximum four-finger gripping force: 4N; Gripping force resolution: 0.50N
- Transverse rotation range of thumb> 65°; Thumb lateral swing speed: 235°/s; Thumb bending speed: 150°/s; Four-finger bending speed: 570°/s
- Wrist joint motor parameters:
- Rated torque: 3NM; Peak torque: 7NM
- Rated speed: 120rpm; Maximum no-load speed: 200rpm
- Reduction ratio: 10:1; Number of pole pairs: 14
Features of Compatible Hands
The hands available for the Unitree H1-2 are advanced and offer a high degree of dexterity, making them suitable for research, manipulation tasks, and education.
- Dex5-1 Tactile Hand: This hand features 20 degrees of freedom (DoF), individually replaceable fingers, and 94 tactile sensors per hand. It’s built for precision and sensitivity, with a fingertip positioning accuracy of ±1mm and a load capacity of up to 4.5 kg. It supports secondary algorithm development and real-time perceptual feedback for tasks requiring high-fidelity interaction.
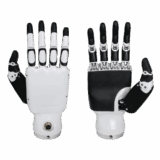
- Inspire Dexterous Hand: This hand has 6 degrees of freedom and 12 joints, allowing for precise manipulation. It has a repeat positioning accuracy of ±0.20 mm and a grip force resolution of 0.50 N. It comes with a wrist joint motor that has a rated torque of 3 Nm.
Integration and Development
The Unitree H1-2’s open development environment is key to its compatibility with third-party hands. The robot uses a triple computing architecture with accessible developer PCs, allowing users to write and run their own code. The system is compatible with DDS middleware and ROS2, which are standard frameworks in robotics for communication between different components. This makes it possible for researchers and developers to integrate and program third-party hands to perform complex tasks.







Avaliações
Ainda não existem avaliações.