

Descripción
Especificaciones técnicas
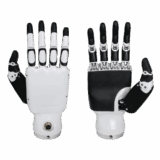
- Grados de libertad: 6; Número de articulaciones: 12; Repetibilidad: ±0,20 mm
- Fuerza máxima de agarre con el pulgar: 6 N; Fuerza máxima de agarre con cuatro dedos: 4 N; Resolución de fuerza de agarre: 0,50 N
- Rango de rotación transversal del pulgar > 65°; Velocidad de oscilación lateral del pulgar: 235°/s; Velocidad de flexión del pulgar: 150°/s; Velocidad de flexión de cuatro dedos: 570°/s
- Parámetros motores de la articulación de la muñeca:
- Par nominal: 3 NM; Par máximo: 7 NM
- Velocidad nominal: 120 rpm; Velocidad máxima sin carga: 200 rpm
- Relación de reducción: 10:1; Número de pares de polos: 14
Características de las manos compatibles
Las manos disponibles para el Unitree H1-2 son avanzadas y ofrecen un alto grado de destreza, lo que las hace adecuadas para investigación, tareas de manipulación y educación.
- Dex5-1 Mano táctilEsta mano cuenta con 20 grados de libertad (PdF), dedos reemplazables individualmente y 94 sensores táctiles por mano. Está diseñada para ofrecer precisión y sensibilidad, con una precisión de posicionamiento de la punta del dedo de ±1 mm y una capacidad de carga de hasta 4,5 kg. Admite el desarrollo de algoritmos secundarios y retroalimentación perceptiva en tiempo real para tareas que requieren interacción de alta fidelidad.
- Inspirar mano diestraEsta mano cuenta con 6 grados de libertad y 12 articulaciones, lo que permite una manipulación precisa. Tiene una precisión de posicionamiento repetitivo de ±0,20 mm y una resolución de fuerza de agarre de 0,50 N. Incorpora un motor para la articulación de la muñeca con un par nominal de 3 Nm.
Integración y desarrollo
El entorno de desarrollo abierto del Unitree H1-2 es clave para su compatibilidad con manos de terceros. El robot utiliza una arquitectura de computación triple con PC de desarrollo accesibles, lo que permite a los usuarios escribir y ejecutar su propio código. El sistema es compatible con Odontólogo middleware y ROS2, que son marcos estándar en robótica para la comunicación entre diferentes componentes. Esto permite a investigadores y desarrolladores integrar y programar manos de terceros para realizar tareas complejas.






Valoraciones
No hay valoraciones aún.