

Descrição
Especificações técnicas
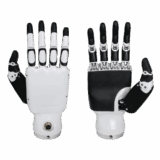
- Graus de liberdade: 6; Número de juntas: 12; Repetibilidade: ±0,20 mm
- Força máxima de preensão do polegar: 6 N; Força máxima de preensão dos quatro dedos: 4 N; Resolução da força de preensão: 0,50 N
- Amplitude de rotação transversal do polegar > 65°; Velocidade de oscilação lateral do polegar: 235°/s; Velocidade de flexão do polegar: 150°/s; Velocidade de flexão dos quatro dedos: 570°/s
- Parâmetros motores da articulação do punho:
- Torque nominal: 3NM; Torque máximo: 7NM
- Velocidade nominal: 120 rpm; Velocidade máxima sem carga: 200 rpm
- Relação de redução: 10:1; Número de pares de pólos: 14
Características das mãos compatíveis
As mãos disponíveis para o Unitree H1-2 são avançadas e oferecem um alto grau de destreza, tornando-as adequadas para pesquisa, tarefas de manipulação e educação.
- Dex5-1 Mão Tátil: Esta mão possui 20 graus de liberdade (DoF), dedos substituíveis individualmente e 94 sensores táteis por mão. Ela foi projetada para precisão e sensibilidade, com precisão de posicionamento da ponta dos dedos de ±1 mm e capacidade de carga de até 4,5 kg. Suporta desenvolvimento de algoritmos secundários e feedback perceptual em tempo real para tarefas que exigem interação de alta fidelidade.
- Inspire Mão Destra: Esta mão possui 6 graus de liberdade e 12 articulações, permitindo uma manipulação precisa. Possui uma precisão de posicionamento de repetição de ±0,20 mm e uma resolução de força de preensão de 0,50 N. Vem com um motor de articulação de pulso com torque nominal de 3 Nm.
Integração e Desenvolvimento
O ambiente de desenvolvimento aberto do Unitree H1-2 é fundamental para sua compatibilidade com terceiros. O robô utiliza uma arquitetura de computação tripla com PCs de desenvolvimento acessíveis, permitindo que os usuários escrevam e executem seu próprio código. O sistema é compatível com DDS middleware e ROS2, que são estruturas padrão em robótica para comunicação entre diferentes componentes. Isso permite que pesquisadores e desenvolvedores integrem e programem mãos de terceiros para executar tarefas complexas.






Avaliações
Ainda não existem avaliações.