


Descrição
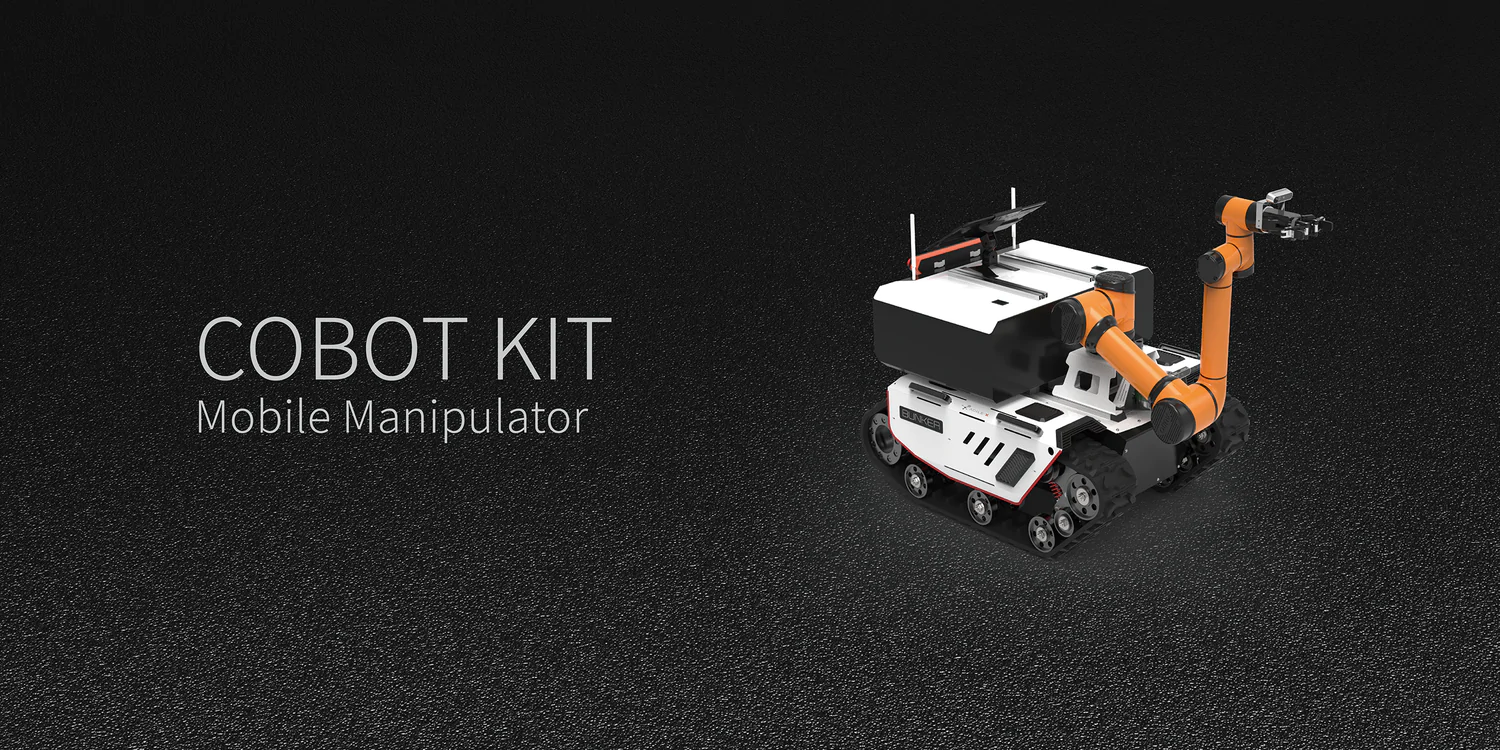
Quick mapping-build based on 3D LIDAR point cloud data
Based on Agilex’s ROS PACKAGE,the Cobot Kit’s long-distance, high-precision, and high-performance multi-beam LiDAR allows users to obtain 3D point cloud data for quick mapping, navigation, and positioning without additional configuration of LiDAR ROS nodes.

- 360° environmental scanning, #2cm top-level precision, 0.1°/0.2° horizontal angular resolution
- @robosense ~600,000pts/s real-time high data rates, 150m long detection range with high resolution
- Protection class IP67
A flexible robot arm for easy grasping
As an alternative, the AUBO-i5/xArm6 robotic arm can meet various requirements for the payload, working radius (819-886mm), and positioning precision. It also allows close human-robot interaction during grasping tasks without a safety fence.
 |
 |
AUBO i5
|
xArm 6
|
Perfect design for precise grasping

The Cobot Kit adopts articulated adaptive electric grippers, which are simply designed and driven by underactuated control. With a re-peated positioning precision of £0.03mm and a maximum grasping force of 160N, it can grasp up to 5 contact points of an object and auto-adapt to the shape of the target object.
High precision visual perception

The Cobot Kit is equipped with an Intel Realsense depth camera, with a resolution of 1280 X 720, a frame rate of 90FPS, and a depth field of view (FOV) of 87° X 58°, it is extremely effitive in date collection and scaning.
| Accessories | Accessories list |
| Computing unit | APQ industrial computer |
| Multi-line – LiDAR | Multi-line LiDAR sensor Sensor controller |
| LCD module | Portable flat panel display USB-to-HDMI cable |
| UBS-to-CAN module | |
| Power module | Switching DC-DC19~72V to 48V power supply DC-to-DC 12V24V48V power supply 24v~12v step-down power module |
| Communication module | 4G router 4G router and antenna |
| Chassis module | Bunker/Scout2.0/Hunter2.0/Rangermini Aviation plug (with wire) Onboard controller |
| Features of kit |
| ROS pre-installed in Industrial Personal Computer (IPC) , and ROS nodes in all sensors and chassis. |
| Navigation and positioning, mapping, and DEMO based on multi-line LiDAR. |
| Motion control (including point and path control) , planning, and static obstacle avoidance based on robotic arm ROS node ” Move it” |
| ROS control over ro botic arm gipper AG-95 |
| QR Code positioning, object color and shape recognition, and DEMO grasping based on Intel Realsense D435 binocular camera |
PRODUCT VIDEO
AgileX ROS-based Mobile Manipulator For Developing





Reviews
There are no reviews yet.