





Descripción
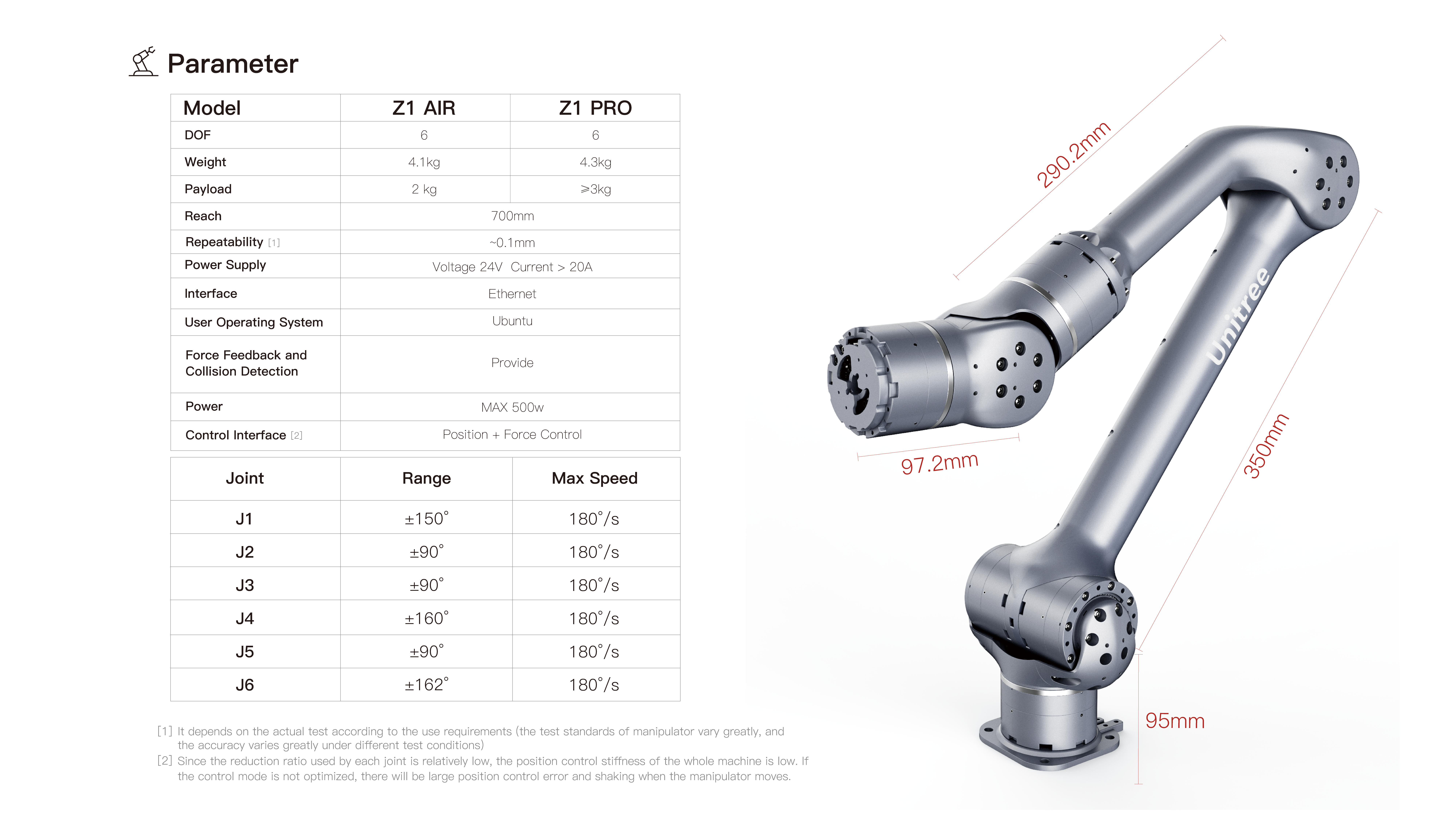
El Manipulador Unitree Z1, en 6-DOF, es un brazo diseñado para el B1 o Aliengo, con la posibilidad de usarlo en otros robots móviles para realizar tareas complejas y explorar diferentes escenarios de aplicación. Los motores incorporados tienen un par máximo de 33 Nm, lo que permite que el brazo tenga una carga útil de 2 a 5 kg.
Interfaz de programación abierta e interfaz avanzada
El programa de control del manipulador y la interfaz de control se abren uno tras otro, y varios actuadores se pueden reemplazar rápidamente al final del manipulador.






Valoraciones
No hay valoraciones aún.