





Descrição
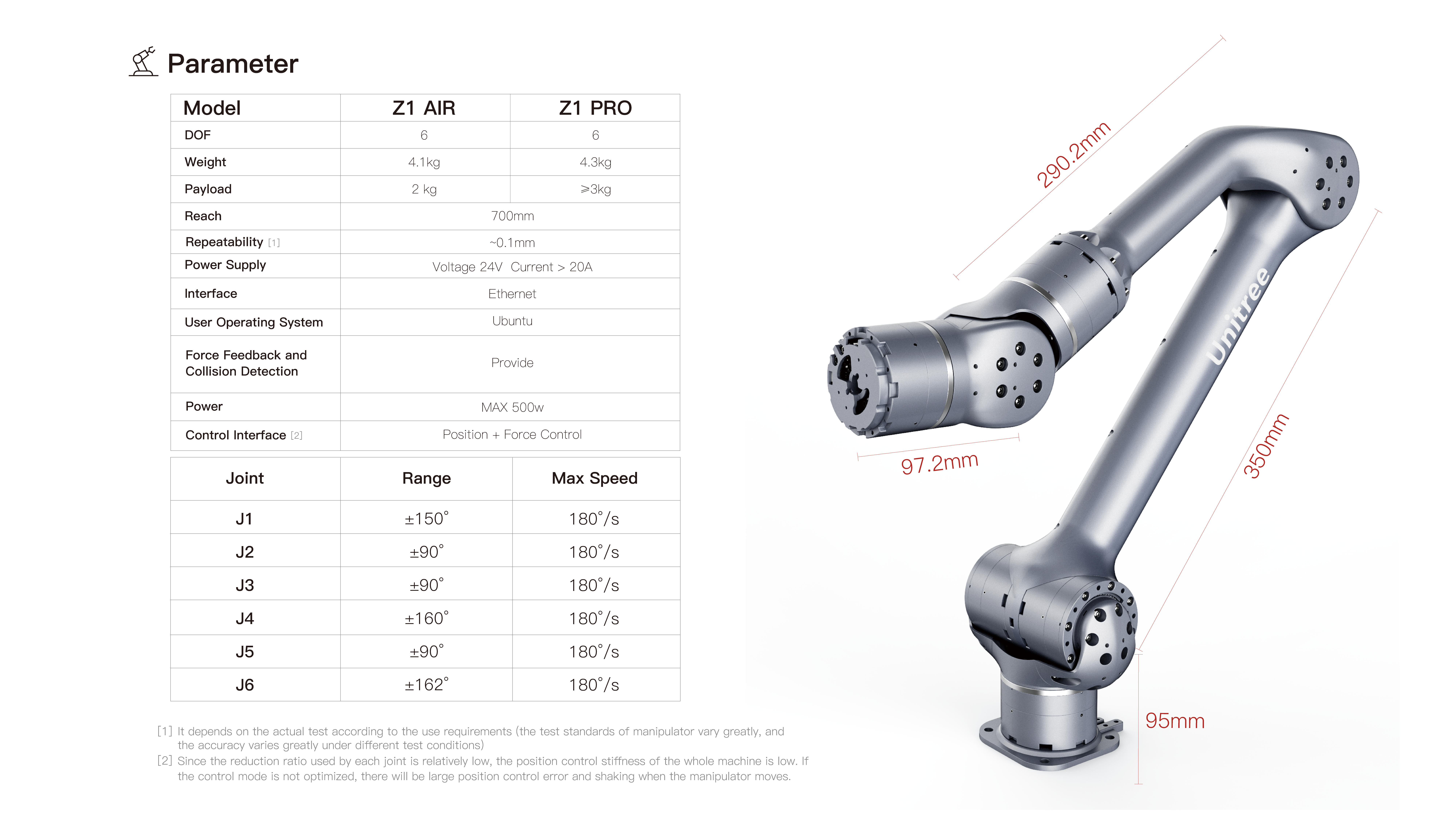
O Manipulador Unitree Z1, em 6-DOF, é um braço projetado para o B1 ou Aliengo, com possibilidade de uso em outros robôs móveis para realizar tarefas complexas e explorar diferentes cenários de aplicação. Os motores integrados têm um torque máximo de 33 Nm, o que permite ao braço uma carga útil de 2 a 5 kg.
Interface de programação aberta e interface avançada
O programa de controle do manipulador e a interface de controle são abertos um após o outro, e vários atuadores podem ser substituídos rapidamente no final do manipulador.







Avaliações
Ainda não existem avaliações.