





Description
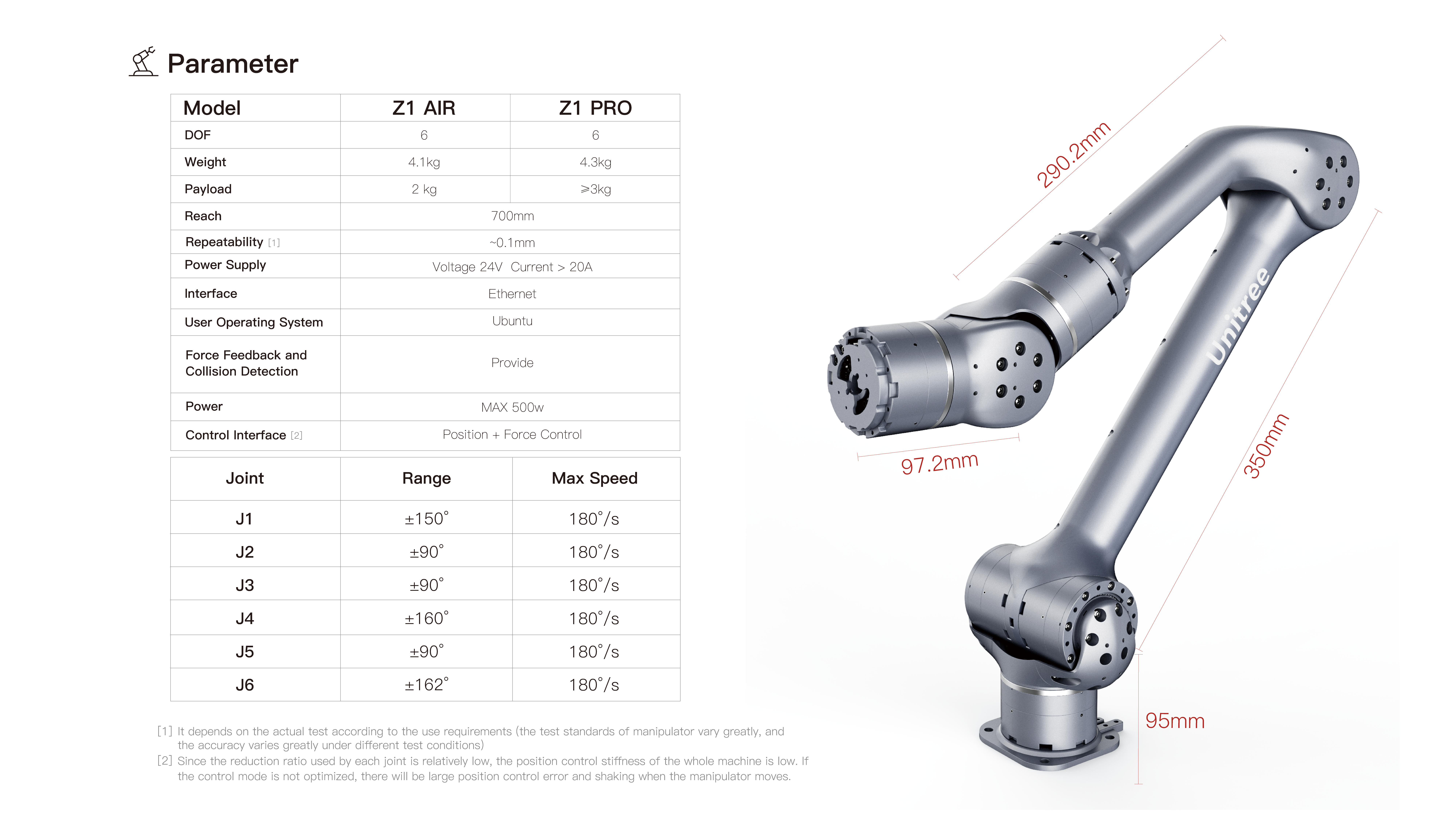
The Unitree Z1 Manipulator, in 6-DOF, is an arm designed for the B1 or Aliengo, with the possibility of using it on other mobile robots to perform complex tasks and explore different application scenarios. The built-in motors have a maximum torque of 33 N.m, which allows the arm a payload of 2 – 5 kg.
Open programming interface and advanced interface
The manipulator control program and control interface are opened one after another, and various actuators can be quickly replaced at the end of the manipulator.








Reviews
There are no reviews yet.