

Descrição
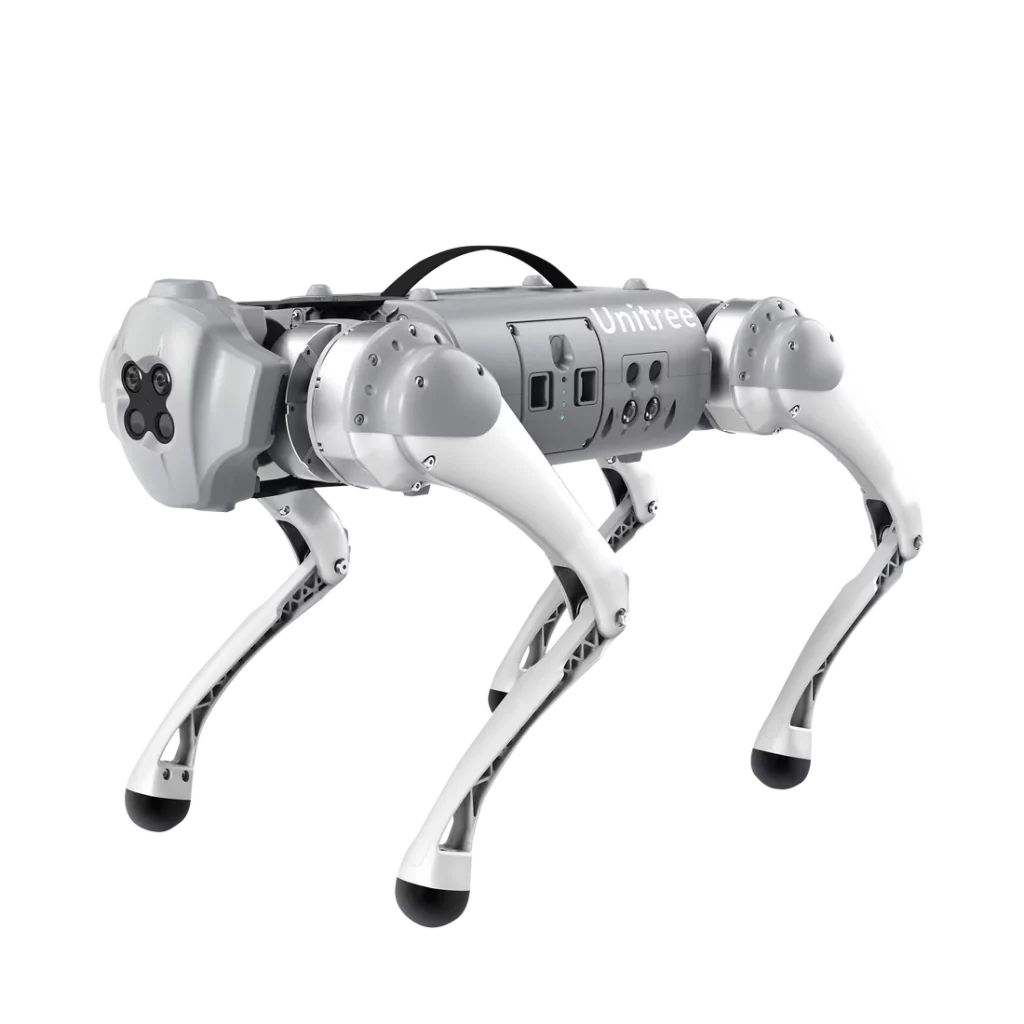
- Design mecânico: O Aliengo apresenta um design quadrúpede com quatro pernas articuladas, cada uma equipada com vários graus de liberdade (DOF), permitindo movimentos versáteis. As pernas são projetadas para imitar a agilidade e flexibilidade das contrapartes biológicas, permitindo ao robô navegar em diversos terrenos com facilidade.
- Atuação e Potência: Cada junta do Aliengo é acionada por motores elétricos de alto torque, proporcionando controle preciso sobre seus movimentos. O sistema de energia normalmente consiste em baterias recarregáveis, garantindo um tempo de operação prolongado dependendo das tarefas específicas e dos cenários de uso.
- Sensores: O Aliengo está equipado com um conjunto de sensores para perceber o ambiente e manter o equilíbrio durante a locomoção. Esses sensores podem incluir, mas não estão limitados a:
- Unidades de medição inercial (IMUs) para medir aceleração, taxa angular e orientação.
- Sensores de profundidade como LiDAR ou câmeras estéreo para detecção e mapeamento de obstáculos.
- Codificadores nos motores para monitorar posições e velocidades das juntas.
- Sensores de força nos pés ou pernas para fornecer feedback sobre o contato com o solo e a pressão.
- Sistema de controle: o sistema de controle do robô orquestra o movimento de seus membros com base no feedback do sensor e em comandos de alto nível. Este sistema normalmente envolve uma combinação de hardware de computação integrado e algoritmos de software para percepção, planejamento e controle. Pode empregar técnicas como cinemática inversa, planejamento de movimento e otimização da marcha para gerar padrões de locomoção estáveis e eficientes.
- Comunicação: O Aliengo pode apresentar recursos de comunicação sem fio para operação remota, transferência de dados e interação com outros dispositivos ou sistemas. Isso permite monitoramento, controle e coordenação em tempo real em diversas aplicações.
- Carga útil e personalização: Dependendo dos requisitos específicos da tarefa ou aplicação, o Aliengo pode ser personalizado com módulos de carga útil ou sensores adicionais. Essa flexibilidade permite que pesquisadores e desenvolvedores adaptem o robô para uma ampla gama de casos de uso, incluindo transporte de cargas, condução de experimentos ou integração de sensores especializados para tarefas específicas de detecção.
No geral, o Unitree Aliengo representa uma plataforma de última geração em robótica quadrúpede, combinando design mecânico avançado, tecnologia de sensores e algoritmos de controle para alcançar capacidades de locomoção ágeis e versáteis em ambientes do mundo real.






Avaliações
Ainda não existem avaliações.