

Description
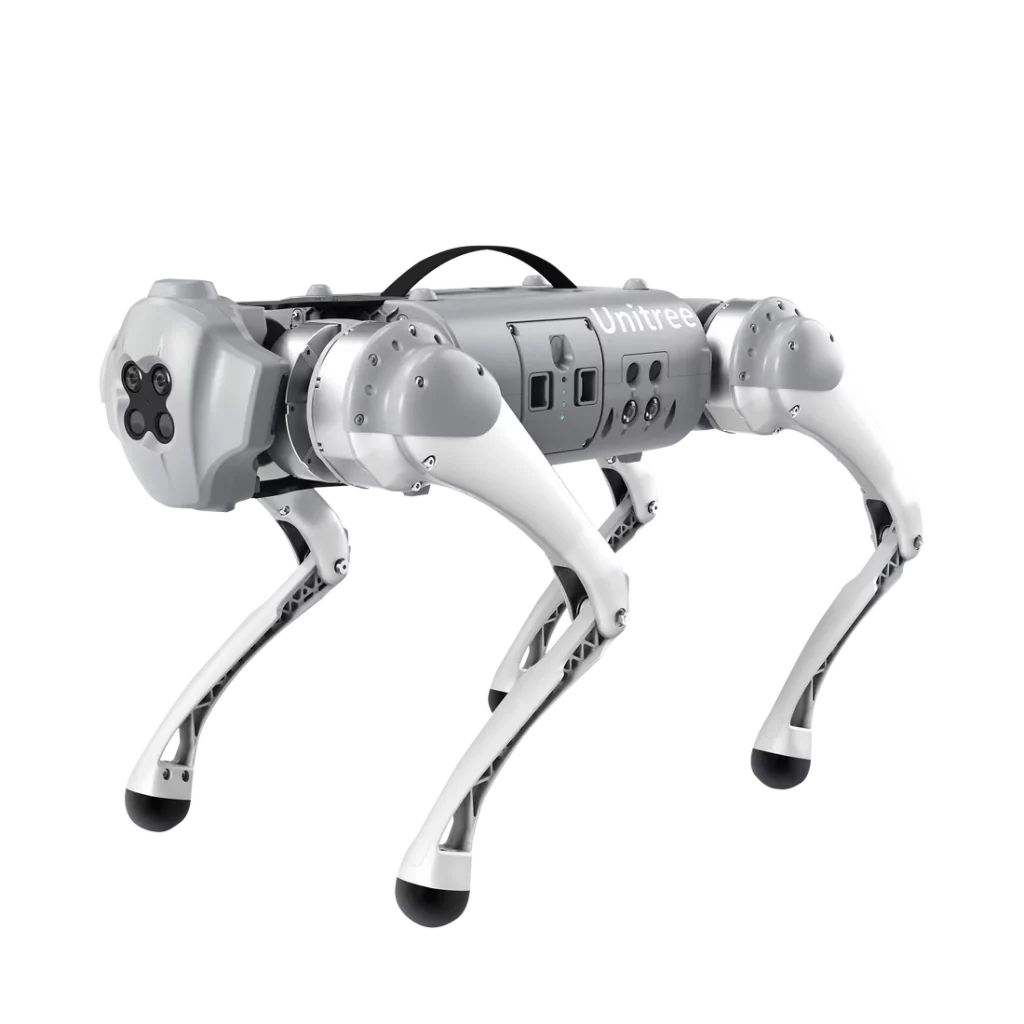
- Mechanical Design: Aliengo features a quadrupedal design with four articulated legs, each equipped with multiple degrees of freedom (DOF) allowing for versatile movement. The legs are designed to mimic the agility and flexibility of biological counterparts, enabling the robot to navigate diverse terrains with ease.
- Actuation and Power: Each joint of Aliengo is actuated by high-torque electric motors, providing precise control over its movements. The power system typically consists of rechargeable batteries, ensuring extended operation time depending on the specific tasks and usage scenarios.
- Sensors: Aliengo is equipped with a suite of sensors to perceive its environment and maintain balance during locomotion. These sensors may include but are not limited to:
- Inertial Measurement Units (IMUs) for measuring acceleration, angular rate, and orientation.
- Depth sensors such as LiDAR or stereo cameras for obstacle detection and mapping.
- Encoders on the motors to monitor joint positions and velocities.
- Force sensors in the feet or legs to provide feedback on ground contact and pressure.
- Control System: The robot’s control system orchestrates the motion of its limbs based on sensor feedback and high-level commands. This system typically involves a combination of onboard computing hardware and software algorithms for perception, planning, and control. It may employ techniques such as inverse kinematics, motion planning, and gait optimization to generate stable and efficient locomotion patterns.
- Communication: Aliengo may feature wireless communication capabilities for remote operation, data transfer, and interaction with other devices or systems. This allows for real-time monitoring, control, and coordination in various applications.
- Payload and Customization: Depending on the specific requirements of the task or application, Aliengo can be customized with additional payload modules or sensors. This flexibility enables researchers and developers to adapt the robot for a wide range of use cases, including carrying payloads, conducting experiments, or integrating specialized sensors for specific sensing tasks.
Overall, Unitree Aliengo represents a state-of-the-art platform in quadrupedal robotics, combining advanced mechanical design, sensor technology, and control algorithms to achieve agile and versatile locomotion capabilities in real-world environments.






Reviews
There are no reviews yet.