



Descripción
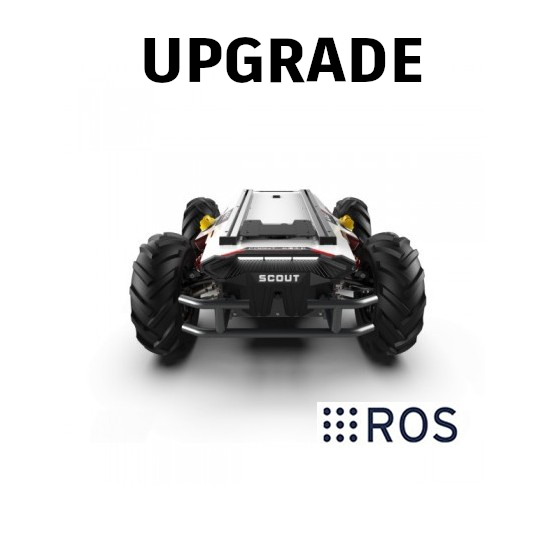
El Mark 1 DIFF también es fácil de equipar con una variedad de sensores y actuadores, como lidar, cámaras, GPS, 4G o 5G, brazos robóticos y más. Esto la convierte en una plataforma poderosa para desarrollar y probar aplicaciones robóticas complejas.
Estas son algunas de las características clave del Hexman Mark 1 DIFF:
- Diseño modular para personalización.
- Variedad de modos de movimiento.
- Fácil de equipar con sensores y actuadores
- Plataforma de software de código abierto
- Precio pagable
Si está buscando una plataforma de robot móvil versátil y asequible para investigación, educación o desarrollo, el Hexman Mark 1 DIFF es una excelente opción.
ESPECIFICACIONES
| Modelo | Marca 1 diferencia |
| Dimensiones largo x ancho x alto | 584 × 617 × 233 milímetros |
| Radio de giro | 415 milímetros |
| Claridad del piso | 132 milímetros |
| Peso | 22 kilogramos |
| Carga útil | 25 kilos |
| Velocidad | 2 m/s |
| Pendiente máxima | 40° (descargado) / 15° (cargado) |
| Altura máxima del obstáculo (descargado) | 90mm |
| Suspensión | Doble horquilla |
| Tiempo de ejecución [1] | 3 – 5 horas |
| motores | 4×250W |
| codificador | 4096 |
| Baterías | 24 V / 14,4 Ah |
| Hora de cargar | 6 horas |
| Interfaz | PODER |
| Protección de ingreso | IP22 |
| Temperatura de funcionamiento | 0°C a 40°C |
[1] El tiempo de ejecución está fuertemente influenciado por las condiciones de trabajo. Errores y modificaciones técnicas sujetos a cambios.





Valoraciones
No hay valoraciones aún.