





Description
AgileX Autopilot Kit: autonomous, customised driving
The AgileX Autopilot robotics kit consists of different modules designed to enable the autonomous navigation of your robotics chassis. The AgileX Autopilot uses numerous navigation instruments and GPS technology for point-to-point navigation: IMU, laser, binocular camera, depth camera, etc.
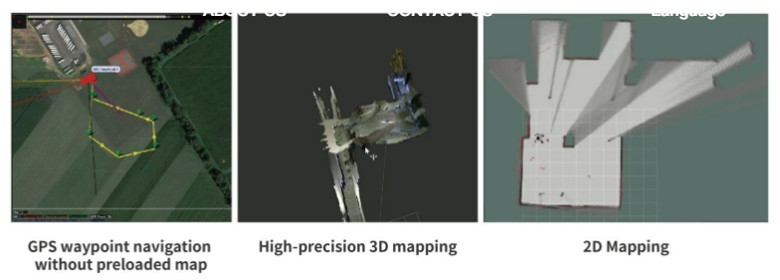
Your mobile platform will be able to navigate a given route while avoiding obstacles, and also find its way in an unfamiliar environment.
The AgileX Autopilot Kit includes:
- Interchangeable with any mobile chassis from the AgileX range: Scout Mini off-road versio Scout Mini off-road version, Bunker, Scout 2.0
- an Intel RealSense T265 binocular camera
- an Intel RealSense D435i stereo depth camera
- a RPLidar LiDAR with time-of-flight technology
- a satellite communication module identifying various signals, including GPS triangulation
- a Pixhawk 4 Autopilot navigation system with gyroscope, magnetometer, barometer and GPS
- an on-board computer with Ubuntu 18.04

Multiple applications thanks to a combined hardware and software system
With the AgileX Autopilot Kit, you will enjoy far more development and application possibilities than with a traditional mobile platform. Thanks to the mechanical capabilities of the various adaptable chassis, your kit will have all the qualities of an off-road vehicle. Its programming environment and resources are entirely open-source for immediately developing applications in various scenarios: environmental monitoring, agriculture, outdoor survey, surveillance and security, etc.
Technical specifications of the AgileX Autopilot robotics kit
- Intel RealSense T265 binocular camera
- Movidius Myraid2 chip
- Field of view: 2 fisheye lenses, combined with nearly hemispherical 163+/-5
- BMI055 inertial measurement unit
- Intel RealSense D435i depth camera
- Infrared stereo technology
- Depth stream output resolution: up to 1280*720
- Depth stream output frame: up to 90 fps
- Min. depth distance: 10 cm
- Laser radar model: RPLidar S1
- Technology: TOF
- Measuring radius: ≤ 40 m
- Sampling speed: 9200/s
- Measuring resolution: ≥ 1 cm
- Scanning frequency: 10 Hz (8–15 Hz adjustable)
- Supported satellite signals: GPS/BDS/GLONASS/QZSS
- RTK positioning accuracy:
- Horizontal: 10 mm + 1 ppm
- Vertical: 15 mm + 1 ppm
- Orientation accuracy (RMS): 0.2° / 1 m (baseline)
- Speed accuracy: 3 cm/s
- Time accuracy: 20 ns
- Differential data: RTCM2.x/3.x CMR CMR+
- Data format: NMEA-0183 BINEX; Femtomes ASCII and Binary format
- Data update: 1 Hz / 5 Hz / 10 Hz / 20 Hz (optional)
- FMU processor: STM32 F765
- IO processor: STM32 F100
- Accel/Gyroscope: ICM-20699
- ACMEL/Gyroscope: BMI055
- Magnetometer: IST8310
- Barometer: MS5611
- Servo guideway input: 0 to 36V
- Weight of the Pixhawk 4 Autopilot: 158 g
- Dimensions of the Pixhawk 4 Autopilot: 44 x 84 x 12 mm
- GPS: u-blox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310
- Onboard computer model: X86
- CPU: I7-8th generation
- Memory: 8 GB
- Storage: 128 GB (SS)
- System: Ubuntu 18.04
- ROS: Melodic







Reviews
There are no reviews yet.