





Descripción
AgileX Autopilot Kit: conducción autónoma y personalizada
El Kit de robótica AgileX Autopilot consta de diferentes módulos diseñados para permitir la navegación autónoma de su chasis robótico. El piloto automático AgileX utiliza numerosos instrumentos de navegación y tecnología GPS para navegación punto a punto: IMU, láser, cámara binocular, cámara de profundidad, etc.
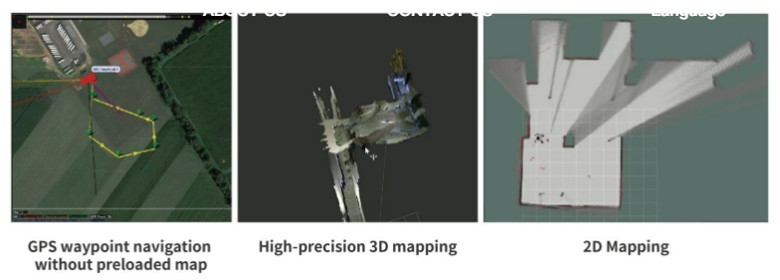
Su plataforma móvil podrá navegar por una ruta determinada mientras evita obstáculos, y también encontrará su camino en un entorno desconocido.
El kit de piloto automático AgileX incluye:
- Intercambiable con cualquier chasis móvil de la gama AgileX: Scout Mini off-road versio Scout Mini versión todoterreno, Bunker, Scout 2.0
- una cámara binocular Intel RealSense T265
- una cámara de profundidad estéreo Intel RealSense D435i
- un RPLidar LiDAR con tecnología de tiempo de vuelo
- un módulo de comunicación por satélite que identifica varias señales, incluida la triangulación GPS
- un sistema de navegación con piloto automático Pixhawk 4 con giroscopio, magnetómetro, barómetro y GPS
- un ordenador de a bordo con Ubuntu 18.04

Múltiples aplicaciones gracias a un sistema combinado de hardware y software
Con AgileX Autopilot Kit, disfrutará de muchas más posibilidades de desarrollo y aplicación que con una plataforma móvil tradicional. Gracias a las capacidades mecánicas de los distintos chasis adaptables, su kit tendrá todas las cualidades de un vehículo todoterreno. Su entorno de programación y recursos son completamente de código abierto para desarrollar aplicaciones de inmediato en varios escenarios: monitoreo ambiental, agricultura, encuestas al aire libre, vigilancia y seguridad, etc.
Especificaciones técnicas del kit de robótica AgileX Autopilot
- Cámara binocular Intel RealSense T265
- Chip Movidius Myraid2
- Campo de visión: 2 lentes ojo de pez, combinados con casi semiesféricos 163+/-5
- Unidad de medida inercial BMI055
- Cámara de profundidad Intel RealSense D435i
- Tecnología estéreo de infrarrojos
- Resolución de salida de flujo de profundidad: hasta 1280*720
- Cuadro de salida de flujo de profundidad: hasta 90 fps
- mín. distancia de profundidad: 10 cm
- Modelo de radar láser: RPLidar S1
- Tecnología: TOF
- Radio de medición: ≤ 40 m
- Velocidad de muestreo: 9200/s
- Resolución de medición: ≥ 1 cm
- Frecuencia de escaneo: 10 Hz (8–15 Hz ajustable)
- Señales satelitales compatibles: GPS/BDS/GLONASS/QZSS
- Precisión de posicionamiento RTK:
- Horizontales: 10 mm + 1 ppm
- Verticales: 15 mm + 1ppm
- Precisión de orientación (RMS): 0,2° / 1 m (línea base)
- Precisión de velocidad: 3 cm/s
- Precisión de tiempo: 20 ns
- Datos diferenciales: RTCM2.x/3.x CMR CMR+
- Formato de datos: NMEA-0183 BINEX; Femtomes ASCII y formato binario
- Actualización de datos: 1 Hz / 5 Hz / 10 Hz / 20 Hz (opcional)
- Procesador FMU: STM32 F765
- Procesador de E/S: STM32 F100
- Acelerador/Giroscopio: ICM-20699
- ACMEL/Giroscopio: BMI055
- Magnetómetro: IST8310
- Barómetro: MS5611
- Entrada de servoguía: 0 a 36V
- Peso del piloto automático Pixhawk 4: 158 g
- Dimensiones del piloto automático Pixhawk 4: 44 x 84 x 12 mm
- GPS: receptor u-blox Neo-M8N GPS/GLONASS; magnetómetro integrado IST8310
- Modelo de computadora de a bordo: X86
- CPU: I7-8ª generación
- Memoria: 8GB
- Almacenamiento: 128 GB (SS)
- Sistema: Ubuntu 18.04
- ROS: Melódico







Valoraciones
No hay valoraciones aún.