





Descrição
Kit AgileX Autopilot: condução autônoma e personalizada
o Kit de robótica AgileX Autopilot consiste em diferentes módulos projetados para permitir a navegação autônoma do seu chassi robótico. O AgileX Autopilot usa vários instrumentos de navegação e tecnologia GPS para navegação ponto a ponto: IMU, laser, câmera binocular, câmera de profundidade, etc
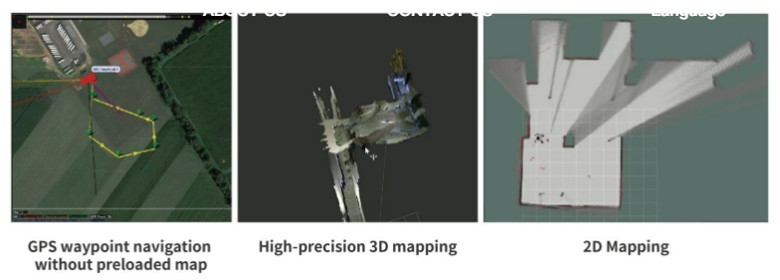
Sua plataforma móvel poderá navegar por uma determinada rota evitando obstáculos e também encontrar seu caminho em um ambiente desconhecido.
O Kit de piloto automático AgileX inclui:
- Intercambiável com qualquer chassi móvel da linha AgileX: Scout Mini versão off-road Scout Mini versão off-road, Bunker, Scout 2.0
- uma câmera binocular Intel RealSense T265
- uma câmera de profundidade estéreo Intel RealSense D435i
- um RPLidar LiDAR com tecnologia de tempo de voo
- um módulo de comunicação por satélite que identifica vários sinais, incluindo triangulação GPS
- um sistema de navegação Pixhawk 4 Autopilot com giroscópio, magnetômetro, barômetro e GPS
- um computador de bordo com Ubuntu 18.04

Múltiplas aplicações graças a um sistema combinado de hardware e software
Com o AgileX Autopilot Kit, você desfrutará de muito mais possibilidades de desenvolvimento e aplicação do que com uma plataforma móvel tradicional. Graças às capacidades mecânicas dos vários chassis adaptáveis, o seu kit terá todas as qualidades de um veículo todo-o-terreno. Seu ambiente de programação e recursos são totalmente open-source para o desenvolvimento imediato de aplicações em vários cenários: monitoramento ambiental, agricultura, pesquisa externa, vigilância e segurança, etc.
Especificações técnicas do kit de robótica AgileX Autopilot
- Câmera binocular Intel RealSense T265
- Chip Movidius Myraid2
- Campo de visão: 2 lentes olho de peixe, combinadas com quase hemisférica 163+/-5
- Unidade de medição inercial BMI055
- Câmera de profundidade Intel RealSense D435i
- Tecnologia estéreo infravermelha
- Resolução de saída de fluxo de profundidade: até 1280*720
- Quadro de saída de fluxo de profundidade: até 90 fps
- Min. distância de profundidade: 10 cm
- Modelo de radar a laser: RPLidar S1
- Tecnologia: TOF
- Raio de medição: ≤ 40 m
- Velocidade de amostragem: 9200/s
- Resolução de medição: ≥ 1 cm
- Frequência de varredura: 10 Hz (8–15 Hz ajustável)
- Sinais de satélite suportados: GPS/BDS/GLONASS/QZSS
- Precisão de posicionamento RTK:
- Horizontal: 10 mm + 1 ppm
- Vertical: 15 mm + 1 ppm
- Precisão de orientação (RMS): 0,2° / 1 m (linha de base)
- Precisão da velocidade: 3 cm/s
- Precisão de tempo: 20 ns
- Dados diferenciais: RTCM2.x/3.x CMR CMR+
- Formato de dados: NMEA-0183 BINEX; Femtomes ASCII e formato binário
- Atualização de dados: 1 Hz / 5 Hz / 10 Hz / 20 Hz (opcional)
- Processador FMU: STM32 F765
- Processador de E/S: STM32 F100
- Aceleração/Giroscópio: ICM-20699
- ACMEL/Giroscópio: BMI055
- Magnetômetro: IST8310
- Barômetro: MS5611
- Entrada de guia de servo: 0 a 36V
- Peso do piloto automático Pixhawk 4: 158 g
- Dimensões do piloto automático Pixhawk 4: 44 x 84 x 12 mm
- GPS: receptor GPS/GLONASS u-blox Neo-M8N; magnetômetro integrado IST8310
- Modelo do computador de bordo: X86
- CPU: I7-8ª geração
- Memória: 8GB
- Armazenamento: 128 GB (SS)
- Sistema: Ubuntu 18.04
- ROS: Melódico






Avaliações
Ainda não existem avaliações.